近期,针对我国渔船作业仍处于粗放型生产,渔具渔法杂乱不规范、作业和监管无序等问题,渔机所通过基于船载视频的人工智能渔船作业方式识别技术,结合多源数据对渔具、渔法的监测,在提高渔船合规作业的监管信息获取能力上取得新进展。


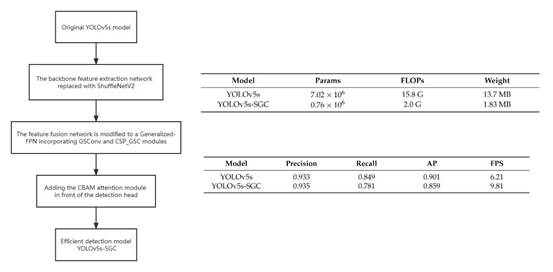

渔机所智慧渔业创新团队采用船载摄像头与船载设备的硬件性能改进了YOLOv5s检测模型,提出一种轻量级实时检测船员及收放网的方法YOLOv5s-SGC,其以YOLOv5s 模型为基础,采用ShuffleNetV2替换了 YOLOv5s的主干网络,用改进的Generalized-FPN 替换了特征融合网络降低检测模型的计算量和模型大小,并在检测头前增加了CBAM注意力模块增加模型的检测精度。改进算法的识别准确度可达到85.9%,运算速度更快,每秒可处理9.81帧图像,满足实时性要求。经研究测试发现,YOLOv5s-SGC能够为实时的渔船作业图像检测提供一种轻量化的实施高效检测方法,可在渔船摄像头上进行部署,为渔船作业状态的实时检测提供技术支持,提高渔船智能化水平。
渔机所与上海海洋大学联合培养研究生汪嘉铭同学,在导师李国栋研究员的指导下开展渔船作业状态智能识别技术研究工作,以第一作者在学术期刊《Fishes》发表研究论文“A Real-Time Lightweight Detection Algorithm for Deck Crew and the Use of Fishing Nets Based on Improved YOLOv5s Network”。


 沪公网安备 31011002002435号
沪公网安备 31011002002435号